
制御用語辞典のページです。製品の仕様や制御に関する用語について説明しています。
あ
アドバンス機能(プログラム制御)
プログラム制御実行中,現在実行中のステップを中断し,次のステップの先頭に移行させる機能です。
ARW機能(アンチリセット・ワインドアップ)
PID制御での制御開始時,大きな偏差[目標値(SV)と現在値(PV)の差]があり,積分動作は現在値(PV)が目標値(SV)に達するまで一定方向に働き続けます。その結果,積分量が過大になりオーバシュートが発生します。
ARWを設定して,積分動作をする領域を制限することでオーバシュートを抑制します。
0%設定時,積分動作領域が最小の設定でオーバシュート抑制が最大になります。
50%設定時,積分動作領域が中の設定でオーバシュート抑制が中になります。
100%設定時,積分動作領域が最大の設定でオーバシュート抑制が最小になります。
オートチューニング機能を使うと,制御対象に対して適切なARW値を自動で設定できます。
い
移動平均回数設定
PVフィルタと同じ目的で使用します。
設定したサンプリング回数で移動平均することにより,入力信号のパラツキを抑制します。
う
ウエイト機能(プログラム制御)
プログラム制御実行中,ステップ終了時に現在値(PV)と目標値(SV)の偏差がウエイト設定値内に入っていない場合,次のステップに進まず,現在値(PV)と目標値(SV)の偏差がウエイト設定値内に入るまで次のステップに移行しない機能です。
ウォームアップ表示機能
電源投入時,マルチレンジ入力タイプで,選択しているセンサの種類が表示される機能です。
え
エアパージ
赤外線センサの先端レンズ部に空気を通すことにより,腐食性ガスや引火性ガス,塵埃などから本体を保護する場合に用います。
また,センサの温度上昇も防ぎます。
SV上昇率(下降率) (設定値ランプ)
目標値(SV)の急激な変化が起こった場合,制御の目標値(SV)を徐々に変化させる機能です。
目標値(SV)が1分間に上昇(下降)する値を設定します。
目標値(SV)を変更した時,変更前の目標値(SV)から変更後の目標値(SV)まで,設定された変化率(℃/分)で制御します。
電源投入時は,現在値(PV)から目標値(SV)まで,設定された変化率(℃/分)で制御します。
SV上昇率(下降率)を0または0.0に設定すると,この機能は働きません。
ATバイアス
AT(オートチューニング)を実行すると,0%,100%のプロセスの限界変化を確認するため,目標値より大きく温度が上昇してしまう場合があります。
そのため,パラメータ算出時にも目標値をオーバさせないために,目標値より離れた位置で0%,100%と出力させる位置を決めることができます。
ATゲイン
立ち上げATで算出されたパラメータを用いて制御を行うと,制御特性が良好にならない場合や応答性が悪い場合小さく設定,振動的になる場合は大きく設定することで,PIDパラメータ算出時に比例帯の算出値が変化します。
お
オートチューニング
制御対象に強制的に変動を与えて,比例帯(P),積分時間(I),微分時間(D)およびARW各設定値の最適値を自動的に算出する機能です。
オートリセット
P動作,PD動作時,現在値(PV)が安定した状態で,現在値(PV)と目標値(SV)の間に偏差(オフセット)が生じます。
オートリセットを実行することにより,リセット設定を自動的に算出し,オフセットを修正できます。
制御対象に変更が無い限り,次回からオートリセットの実行は必要ありません。
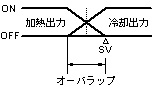
オーバラップ・デッドバンド
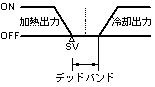
加熱・冷却制御動作を備えた機種の場合,目標値を中心に加熱と冷却の出力が同時に出る範囲をオーバラップといい,逆にどちらの出力も出ない範囲をデッドバンドといいます。
オーバラップを設定すると,エネルギー損失を生ずる事がありますが,制御精度の向上と応答を速める効果があります。
デッドバンドを設定すると,加熱も冷却も行われない領域が生じ,デッドバンド内では制御が不安定になります。
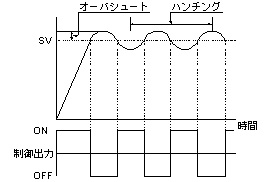
オーバシュート
制御対象の温度が昇温していくと,目標値(SV)を大きく越えてしまうことがあります。 このことを,オーバシュートと言います。
オートリセット
P動作,PD動作時,現在値(PV)が安定した状態で,現在値(PV)と目標値(SV)の間に偏差(オフセット)が生じます。
オートリセットを実行することにより,リセット設定を自動的に算出し,オフセットを修正できます。
制御対象に変更が無い限り,次回からオートリセットの実行は必要ありません。
オープンコレクタ出力
出力トランジスタのコレクタが,出力端子に直接つながれたものです。
直流電源と電磁開閉器(リレー)が必要です。

オフセット
比例(P)動作または比例+微分(PD)動作において,目標値(SV)と現在値(PV)が一致しないまま安定する場合があります。
この目標値(SV)と現在値(PV)の誤差をオフセットといいます。

ON/OFF動作
現在値(PV)が目標値(SV)よりも低い場合制御出力をONにし,現在値(PV)が目標値(SV)を越えた場合制御出力をOFFにします。
オーバシュートやハンチングが生じますので,精度を要求する温度制御には向きません。
オンオフリレーサーボ
オープン出力,クローズ出力に各々リレー接点を備えており,偏差に応じて何れかの接点を動作させ,コントロールモータまたはモータバルブを正・逆転させるものです。
モータとポテンショメータは連結されており,制御状態(開閉状態)が調節計にフィードバックされます。

温度制御
温度調節計による温度制御の基本構成を以下に示します。

A.センサ
制御対象の温度を測定します。
センサとして,熱電対,測温抵抗体,電圧入力,電流入力を使用できます。
B.温度調節計
温度調節計は,センサが測定した温度を測定値(PV)として受け取ります。
そして測定値(PV)と制御の目標値(SV)との差(偏差)を打ち消すように出力操作量(MV)を算出します。
出力操作量(MV)は,調節信号として,操作端へ出力されます。
調節信号には,リレー出力,無接点電圧出力(SSR駆動用),電流出力などがあります。
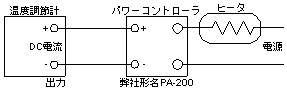
C.操作端
温度調節計からの調節信号を受け,ヒータへの負荷電源をON/OFFします。
操作端には,電磁開閉器,SSR,電力調整器などがあります。
最適な温度制御
理想的な温度制御とは,図1のように目標値(SV)をAからBに変更した場合,測定値(PV)が目標値(SV)に達するまでの時間的な応答遅れ,オーバシュートなどがなく,いかなる外乱に対しても目標値(SV)設定した値で制御することです。
図1 理想的な温度制御
実際には熱容量,静特性,動特性,外乱などの要因が複雑に絡みあい,現実的には図1のような温度制御を実現させることは困難です。
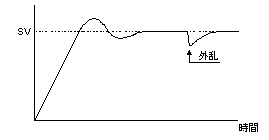
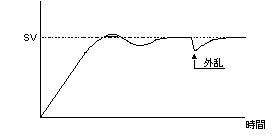
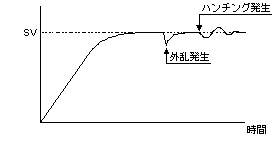
また,用途,目的によっては,図3のように立ち上がりが遅くてもオーバシュートを抑制したい温度制御や,図4のようにオーバシュートが生じても早く上昇させ,安定させたい温度制御などが必要な場合もあります。
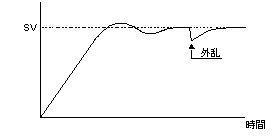
一般的には,図2を最適な温度制御といいます。
温度調節計は,図2のように測定値(PV)をすばやく目標値(SV)に昇温させ,安定させるよう設計されています。 また,急激な外乱により,温度にふらつきが生じた場合でも,すばやい応答でふらつきを最短の時間で収束させ,安定した温度制御を行います。
図2 最適な温度制御
図3 安定性は高いが,立ち上がりが遅い制御
図4 立ち上がりは早いが,オーバシュート,アンダシュートをして安定する制御
制御対象の特性
温度制御で最適な制御を行うためには,温度調節計,センサ,操作端の他に制御対象がどのような特性を持っているか,十分理解する必要があります。
例えば,恒温槽(制御対象)の静特性が100℃までしか昇温できないのに,温度調節計の目標値(SV)を200℃に設定しても恒温槽の温度は100℃までしか昇温しません。
制御対象の特性は,下記4種類によって決まります。
・熱容量: 加熱のしやすさをあらわし,制御対象の容積の大小が関係します。
・静特性: 加熱の能力をあらわし,ヒータ容量の大小で決まります。
・動特性: 加熱初期の昇温特性(過渡応答)をあらわします。
ヒータ容量,炉の容量の大小,センサの位置が複雑に関係します。
・外乱: 制御温度の変動/変化の原因となるものです。
例えば,周囲温度,電源電圧の変化なども外乱の原因になります。
温度調節計(温調計・温調器)
温度調節計(温調計・温調器)は,センサが測定した温度[測定値(PV)]と制御の目標値(SV)との差(偏差)を打ち消すように出力操作量(MV)を算出し,制御を行う計器のことです。
弊社では,パネルマウント形(ACシリーズ,BC□2シリーズなど)および盤内設置形(WCL-13A,QX1シリーズなど)の温度調節計(温調計・温調器)をご用意しています。
温度調節計(温調計・温調器)・指示調節計・プログラムコントローラはこちらオートバランス制御機能
射出成型機や金属プレートなどの1つの制御対象に複数の制御箇所で均熱を図り,部分焼けや機械的歪みなどを抑える機能です。
ON-OFF制御
ON、OFFのみの制御方式です。
2位置制御とも呼ばれ,精度を求めない制御対象に使用します。
か
外部設定
外部からのアナログまたはデジタル信号を,目標値(SV)として設定できる機能です。
外 乱
制御温度の変動変化の原因となるものです。
例えば,周囲温度,電源電圧の変化等も外乱の原因になります。
カスケード制御
カスケード制御は,2つのPID制御を組み合わせて,1つのフィードバックループを作り,制御する方式です。
MVが変化してから,制御対象を測定するまでの遅れ時間や無駄時間が極端に大きい制御対象を制御する場合に有効です。
PVがSVに到達するまでの時間は長くなりますが,安定性の高い制御が可能です。
カスケード機能搭載機種
加熱(逆)動作
現在値(PV)が目標値(SV)より低い場合制御出力ON,現在値(PV)が目標値(SV)より高い場合制御出力OFFとなる制御動作の事をいいます。
例えば,電気炉は,加熱(逆)動作となります。
加熱冷却制御
加熱・冷却制御は、制御対象の温度制御が加熱動作のみでは制御が難しい場合に冷却動作と組み合わせて行う制御です。
目標値(SV)と現在値(PV)に応じて制御された制御結果を加熱側出力と冷却側出力の2つに振り分けて出力します。
目標値(SV)より現在値(PV)が大きい場合、冷却側出力を出力します。
目標値(SV)より現在値(PV)が小さい場合、加熱側出力を出力します。
加熱側出力と冷却側出力の両方を出力する帯域、また両方を出力しない帯域を設定することもできます。
(例)発熱を伴うプロセス(押出機等)や、常温付近での温度制御(環境試験機等)では制御対象に対し、 加熱と冷却の両方の動作を行う加熱・冷却制御が有効です。
簡易プログラムコントローラ
温度と時間の簡単なプログラム設定で,プログラムコントローラと同じ制御動作を行う機能です。
簡易プログラムコントローラ機能搭載機種
き
キャリブレータ
計測器を校正する計器のことをいいます。 電圧・電流・熱電対・測温抵抗体・パルスなどを発生し,点検・校正作業を行うことができます。
許容温度範囲
変換器の特性に永久変化を生じることなく使用できる温度範囲のことをいいます。
Gap-PID制御
水位を一定にする場合に流量をコントロールしますが,流入・流出を行う際に外乱によって液面が大きく変動します。
この外乱の影響を緩和するため,偏差が小さい場合に外乱の影響を受けにくくする制御方式です。
け
警報動作
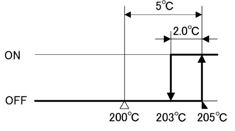
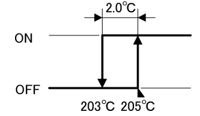
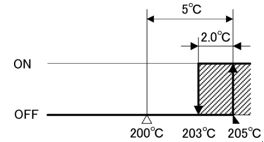
・上限警報(偏差警報)
目標値(SV)に対して±の偏差設定で,現在値(PV)が上限警報設定値に達すると警報出力ONとなります。

[設定例]
目標値(SV):200℃
A1動作点: 5℃
A1動作すきま: 2.0℃
[警報動作]
205℃≦現在値(PV)の時,警報出力ON
現在値(PV)≦203℃の時,警報出力OFF
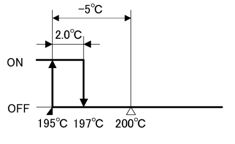
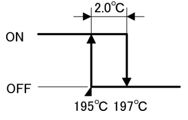
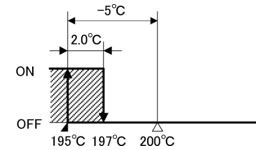
・下限警報(偏差警報)
目標値(SV)に対して±の偏差設定で,現在値(PV)が下限警報設定値に達すると警報出力ONとなります。
[設定例]
目標値(SV): 200℃
A1動作点: -5℃
A1動作すきま: 2.0℃
[警報動作]
現在値(PV)≦195℃の時,警報出力ON
197℃≦現在値(PV)の時,警報出力OFF
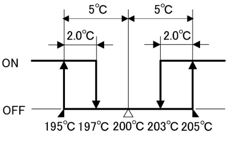
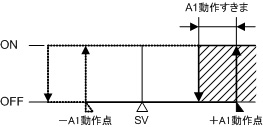
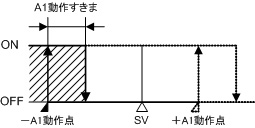
・上下限警報(偏差警報)
上限警報と下限警報の両方を備えた警報で,現在値(PV)が上下何れの警報設定値に達すると警報出力ONとなります。
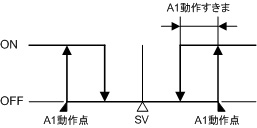
[設定例]
目標値(SV):200℃
A1動作点: 5℃
A1動作すきま: 2.0℃
[警報動作]
205℃≦現在値(PV)の時,警報出力ON
現在値(PV)≦203℃の時,警報出力OFF
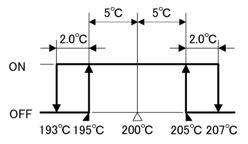
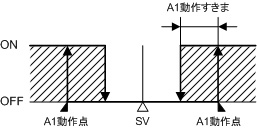
・上下限範囲警報(偏差警報)
上下限の設定範囲内で出力がON状態の時,現在値(PV)が上下何れかの警報設定値を越えると出力はOFFになります。
[設定例]
目標値(SV):200℃
A1動作点: 5℃
A1動作すきま: 2.0℃
[警報動作]
195℃≦現在値(PV)≦205℃の時,警報出力ON
207℃≦現在値(PV)または現在値(P V)≦193℃の時,警報出力OFF
・絶対値警報
計器の目盛範囲内で,任意の点に警報設定でき,現在値(PV)がその警報設定値に達すると警報出力ONとなります。
絶対値上限警報
[設定例]
A1動作点: 205℃
A1動作すきま: 2.0℃
[警報動作]
205℃≦現在値(PV)の時,警報出力ON
現在値(PV)≦203℃の時,警報出力OFF
絶対値下限警報
[設定例]
A1動作点: 195℃
A1動作すきま: 2.0℃
[警報動作]
現在値(PV)≦195℃の時,警報出力ON
197℃≦現在値(PV)の時,警報出力OFF
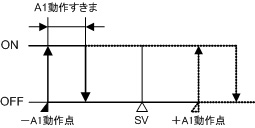
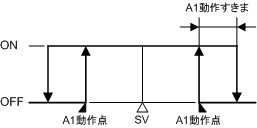
・待機機能
この機能は,計器電源投入時,現在値(PV)が警報動作のはたらく領域内であっても出力が出ない機能です。
また,運転中に目標値(SV)を変更したために警報動作点が上記の領域内に入っても警報出力が出ない機能です。
運転を継続させ,現在値(PV)がその警報動作点を一度越えると待機機能は解除されます。
待機付上限警報
[設定例]
A1動作点: 200℃
A1動作すきま: 5℃
A1動作すきま: 2.0℃
[警報動作]
205℃≦現在値(PV)の時,警報出力ON
現在値(PV)≦203℃の時,警報出力OFF
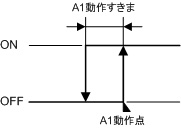
待機付下限警報
[設定例]
A1動作点: 200℃
A1動作すきま: -5℃
A1動作すきま: 2.0℃
[警報動作]
現在値(PV)≦195℃の時,警報出力ON
197℃≦現在値(PV)の時,警報出力OFF
待機付上下限警報
[設定例]
A1動作点: 200℃
A1動作すきま: 5℃
A1動作すきま: 2.0℃
[警報動作]
205℃≦現在値(PV)または現在値(PV)≦195℃の時,警報出力ON
197℃≦現在値(PV)≦203℃の時,警報出力OFF

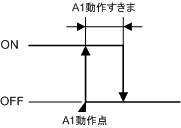
警報動作すきま
警報動作が,ONからOFFまたはOFFからONに切り替わるまでの幅のことです。
警報動作すきまを小さくすると,警報動作点付近のわずかな温度変化でも警報出力がON/OFFし,接続された装置に悪影響を与えれることがあります。
これを防ぐため,ON/OFFの動作にすきま(ヒステリシス)を設けます。
警報動作遅延タイマ機能
現在値(PV)が,警報ONまたはOFF領域に入ってきても警報動作遅延時間で設定した値を過ぎるまでは,警報出力を出力しない機能です。
例えば,警報動作遅延時間を10秒に設定した場合温度が警報ONまたはOFF領域に入ってから10秒後に警報出力を出力します。
警報0設定有効/無効選択
従来は警報設定値 0 を設定することで警報動作を停止していましたが,警報機能の多様化で設定値 0 も警報動作する必要が生じました。 有効を選択すると警報設定値が0でも警報動作します。 無効を選択すると従来と同様の動作になります。
さ
サーモパイル
物体から放射されている赤外線を吸収し,それにより素子が暖められ,起電力を発生します。
この素子のことをいいます。
3導線式(測温抵抗体)
測温抵抗体において抵抗素子の一端に2本,他端に1本の導線を接続し,導線延長時の導線抵抗の影響を除くようにした方式です。 ただし,計器によりその精度を満足する為に1導線当たりの許容抵抗値があります。
センサ・検出端はこちらし
自己診断機能
ウオッチドッグタイマーでCPUを監視し,異常時は全出力をOFFにして計器を初期状態にする機能です。
自動/手動制御切替
メンテナンス時の出力,開ループ制御に使用します。
自動冷接点温度補償
熱電対入力の計器において,入力端子の温度を検出し,常時基準接点を0℃に置かれた場合と同様の熱電対信号を計器に与えるようにします。
視野角
赤外線センサの視野径と測定距離との比を示す角度です。
同じ視野径のものを測定する場合,視野角が狭いと測定距離は長く,視野角が広いと測定距離は短くなります。
出力リミット機能
制御出力の出力操作量を制限する機能です。
例えば,制御出力の操作量上限値が大きい場合80%,操作量下限値が小さすぎる場合20%等と設定します。
シリアル通信
データを1ビットずつ転送する方式のことをいいます。(代表的なもの RS-232C, RS-422A, RS-485)
出力最小ON/OFF時間
制御出力がリレーの場合,出力時間がリレーの動作時間以下にならないようにするため制御出力最小ON時間を設定します。
アクチュエータ等の破損防止に使用します。
出力選択機能
調節計を使用している中で,未使用の入力が存在した場合に現在使用している入力チャンネルが故障した場合などの状況で,未使用のチャンネルに入力を変更し,入力に対する出力箇所を選択することができる機能です。
出力ゲイン-バイアス機能
金属プレートを温度制御するような場合,入力に対して出力が複数箇所でヒータ制御を行うなど,入力に対して複数の出力を使用している場合に,あらかじめ出力量の分布が分かっていれば,基準出力に対して比率,バイアスを設定する事で,均等に制御を行うことが可能になる機能です。
す
水蒸気圧
気体中(空気中)に存在する水蒸気の圧力をいいます。
スケーリング機能
入力レンジ内で,任意にスケーリング上限設定または下限設定を変更できる機能です。
ただし,入力レンジで精度保証している入力レンジ最小巾より小さくされると精度の保証はできません。
スタートビット
1文字データの送信開始を,受信側に知らせるための信号のことをいいます。
ストップビット
1文字データの送信終了を,受信側に知らせるための信号のことをいいます。
Slow-PID制御
目標値追従性がよく,オーバシュートを抑えたい場合に使用する制御方式です。
射出成型機などオーバシュートが一度発生すると整定までに時間が要する場合に使用します。
せ
制御出力OFF機能
計器電源をOFFにしたのと同じ状態にする機能です。
静特性
加熱の能力をあらわし,ヒータ容量の大小で決まります。
赤外線
スペクトル(光が波長の順にならんだもの)の赤色の外側にある,目に見えない電磁波のことをいいます。
また,全ての物体は赤外線を出しており,物体の温度が高くなるほど強い赤外線を放出しています。
積算通電時間計測機能
計器の通電時間を計測することで 計器自身の電子部品の寿命等の目安として使用できる機能です。
積分/微分小数点位置選択
アナログ入出力などで比例周期が存在しない場合,1秒単位の演算では入力サンプリングを超えてしまう場合に,時間の単位を小さくするために小数点位置を変更できます。
絶対湿度
単位体積(1m3)の気体中に含まれている水蒸気の質量(g)を絶対湿度といいます。
SV上昇率(下降率) (設定値ランプ)
目標値(SV)の急激な変化が起こった場合,制御の目標値(SV)を徐々に変化させる機能です。
目標値(SV)が1分間に上昇(下降)する値を設定します。
目標値(SV)を変更した時,変更前の目標値(SV)から変更後の目標値(SV)まで,設定された変化率(℃/分)で制御します。
電源投入時は,現在値(PV)から目標値(SV)まで,設定された変化率(℃/分)で制御します。
SV上昇率(下降率)を0または0.0に設定すると,この機能は働きません。
設定値メモリ機能
目標値(SV)とその他の設定パラメータを,1ファイルとし,設定値ファイルを保存,呼出することができる機能です。
設定値リミット機能
目標値(SV)の設定できる範囲を制限する機能です。
例えば,入力レンジが0~999 で,SV下限設定を0 ,SV上限設定を600 に設定した場合,目標値(SV)は0~600 の範囲内でしか設定できません。
設定値ロック機能
全設定値または目標値(SV)を除く他の設定値を変更できないようにする機能です。
接点開閉積算回数計測機能
調節計や制御盤などで使用されている電磁開閉器のON/OFF回数を計測し,交換時期などの目安として使用できる機能です。
センサ断線警報
熱電対,測温抵抗体の断線を警告する機能で,制御出力をOFFにする安全機能が付加されています。
センサ補正機能
制御したい箇所にセンサを設置できない時,センサが測定した温度と制御箇所の温度と異なることがあります。
また,複数の調節計を用いて制御する場合,センサの精度あるいは負荷容量のばらつき等で同一目標値(SV)でも測定温度が一致しないことがあります。
このような時にセンサの入力値を補正して,制御箇所の温度を希望する温度に合わせることができます。
ただし,センサ補正値にかかわらず,入力定格のレンジ内で有効です。
センサ補正後のPV=現在のPV+(センサ補正設定値)
センサ補正係数設定
制御箇所と計測点が離れている等で温度が異なる場合に差異を補正することができます。
センサ補正と共に使用することで2点校正ができます。
そ
操作量バイアス機能
むだ時間や機構的なあそび,外乱による影響等による操作量をあらかじめ加えておくことができる機能です。
相対湿度
湿度を表すのに最もよく使用されます。
気体中(空気中)の水蒸気圧[e]と飽和水蒸気圧[es]との比率で表現されます。 [ %RH=e/es×100 ]
測温抵抗体
測温抵抗体は,一般に金属の電気抵抗が,温度変化によって増減する(温度と金属の電気抵抗には一定の関係がある)という性質を利用したものです。
これにより金属線の電気抵抗を測って温度を測定する計器が抵抗温度計で,その中で白金線の温度による抵抗変化を利用するものが白金抵抗温度計であり,その感熱部を測温抵抗体といいます。
た
立ち上げAT
温度干渉などが理由で温度が下がらない,干渉により温度が下降中に再度温度が上昇してしまうなど,AT(オートチューニング)でPIDパラメータが算出することが困難な場合,通常制御中にPIDパラメータを算出する方法です。
ち
調歩同期式
各データの先頭にスタートビット,最後にストップビットを付加し,1データごとにビット同期をとる伝送方式のことをいいます。
直流電流出力
偏差に応じて,4~20mA DC の電流を出力します。
つ
通信速度
データを転送する速度のことをいいます。
例えば,通信速度を2400bpsとすると1秒間に2400ビット,1文字10ビットとして計算すると1秒間に240文字送れることになります。
て
停電対策機能
停電時間が30ms以上の場合,不揮発性メモリで設定データをバックアップし,設定データを守る機能です。
オーバラップ・デッドバンド
加熱・冷却制御動作を備えた機種の場合,目標値を中心に加熱と冷却の出力が同時に出る範囲をオーバラップといい,逆にどちらの出力も出ない範囲をデッドバンドといいます。
オーバラップを設定すると,エネルギー損失を生ずる事がありますが,制御精度の向上と応答を速める効果があります。
デッドバンドを設定すると,加熱も冷却も行われない領域が生じ,デッドバンド内では制御が不安定になります。
伝送出力
調節計の現在値(PV),目標値(SV)または操作量(MV)を制御動作と無関係にアナログ出力します。
と
動作すきま(ON/OFF制御動作時)
動作すきまは,制御動作がONからOFFまたはOFFからONに切り替わるまでの幅のことです。
動作すきまを小さくすると,目標値(SV)付近のわずかな温度変化でも制御出力がON/OFFします。
このため,出力リレーの寿命が短くなったり,接続された装置に悪影響を与えたりします。
これを防ぐため,ON/OFFの動作にすきまを設けます。
動特性
加熱初期の昇温特性(過渡応答)をあらわします。
ヒータ容量,炉の容量の大小,センサの位置が複雑に関係します。
に
入力サンプリング周期
デジタル計器独特の入力方式で,入力アナログ信号をデジタル信号に変換する処理時間をいいます。
入力演算機能
内外気の温度差を測定し,結露しない温度差を設定する事で内気の温度をコントロールするなど,複数の入力がある調節計で2つの入力を四則演算することができる機能です。
入力差検知機能
包装機などで,センサで測定している箇所と温度差が開きすぎると,正常に包装できないなど,コントロールしていない箇所との温度差が大きいと問題になる場合において異常検知する機能です。
2自由度PID制御
目標値追従と外乱抑制の2つに対して有効な制御方式です。
通常のPID制御に比べパラメータが増えますが,より精度のよい制御結果を得ることができます。
ね
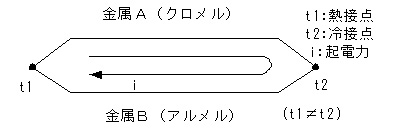
熱電対
熱電対素線は,互いに異なる2種の金属の一端を溶接接合して作られています。
この接合点を測温接点(熱接点),他端を基準接点(冷接点)といいます。
この両接点の間に温度差を与えると,温度差と一定の関係にある熱起電力が生じます(ゼーベック効果といいます)。
したがって基準接点温度を一定に保てば,この起電力(mV)から測温接点の温度を知ることができます。
これを利用した温度測定方法が熱電温度計です。
これは,抵抗温度計では測定できないような比較的高温度(600 ~1200 位)の測定に適しています。
弊社の温度調節計には,冷接点温度補償回路を内蔵していますので,測定点の温度が直読できるようになっています。
熱電対の種類
K (クロメル-アルメル)
J (鉄-コンスタンタン)
R (白金ロジウム13%-白金)
S (白金ロジウム10%-白金)
B (白金ロジウム30%-白金ロジウム6%)
E (クロメル-コンスタンタン)
T (銅-コンスタンタン)
N (ナイクロシル-ナイシル)
(以上JIS,IEC規格のもの)
C (W/Re5-26) (タングステン・レニウム5%-タングステン・レニウム26%)
PL-Ⅱ(プラチネル)
(以上JIS,IEC規格以外のもの)
熱容量
加熱のしやすさをあらわし,制御対象の容積の大小が関係します。
は
パターンエンド出力
プログラムが終了した時点で,終了を知らせる出力のことです。
バランスレスバンプレス機能
オート(自動)制御からマニュアル(手動)制御に切り替えた時またはマニュアル(手動)制御からオート(自動)制御に切り替えた時に,操作量が急変するのを防ぐ機能です。
パリティ
1データを転送するごとに,データの誤りがないかどうかをチェックする方式の1つで,偶数パリティ,奇数パリティがあります。
半二重通信
両方向の伝送は可能ですが,送受信を交互に行う通信方式です。
ハンチング
制御結果が振動的になる時の状態をいいます。
ひ
ヒータ断線警報
ヒータ回路の導線1本をCTの穴へ通し,CTからの出力線を温度調節計のCT入力端子へ配線します。
ヒータ回路の導線に交流電流が流れると,導線の周囲に磁界が発生し,その磁界によりCTに交流電流が生じます。
この交流電流を測定しヒータに流れている電流値を求め,ヒータ断線警報設定値と比較します。
設定値より低ければ,ヒータが断線していると判断し,警報出力をオンにします。
P動作(比例動作)
比例帯の中で,目標値(SV)と現在値(PV)の偏差に比例した操作量を出力する制御動作をいいます。
現在値(PV)がA点に達するまでは出力はON,これを越えると(比例帯に入る),比例周期で制御出力がON/OFFし始め,目標値(SV)を越えると完全に制御出力OFF状態になります。
[A点から目標値(SV)へ昇温するにつれ,制御出力のON時間が短くなり,逆にOFFの時間が長くなります。]
ON/OFF動作に比べ,オーバシュートはなくなり,ハンチングも小さくなりますが,オフセットを生じます。
オフセット修正機能によって,オフセットを0にする事ができます。
P動作は,気体圧力制御やレベル制御のような無駄時間の無いプロセスに向いています。
比例帯を大きくした場合
低い温度から制御出力がON/OFFするため,温度が目標値(SV)に昇温するまでに時間がかかり,またオフセットも大きくなります。
比例帯を小さくした場合
目標値(SV)付近から制御出力がON/OFFするため,温度が目標値(SV)に昇温するまでの時間は短くオフセットも小さくなりますが,ハンチングが大きくなります。
※比例帯を極端に小さくしますと,ON/OFF動作と同じような制御になります。
PI動作(比例+積分動作)
P動作で生じたオフセットを,I動作が自動的に修正し,目標値(SV)で温度制御を行います。
しかし,外乱による急激な温度変化に対しては,温度が安定するまでに時間がかかります。
PI動作は,変化速度の遅い温度制御に向いています。
I動作の時間を短くすると,修正動作は強くなり,オフセットは短時間で修正されますがハンチングを起きやすくします。
I動作の時間を長くすると,修正動作は弱くなり,オフセットの修正に時間がかかります。
PD動作(比例+微分動作)
PD動作は,P動作に比べて外乱による急激な温度変化に対しても応答が早く,短時間で制御を安定化させ,過渡応答特性の向上を図ります。
PD動作は,変化速度の速い温度制御に向いています。
D動作の時間を短くすると,修正動作は弱くなり,急激な温度変化に対する応答が遅くなります。
また,昇温時の急激な温度上昇を抑制する働きが弱くなる為,目標値(SV)までの昇温時間は早くなりますが,その分オーバシュートが起きやすくなります。
D動作の時間を長くすると,修正動作は強くなり,急激な温度変化に対する応答が早くなります。
また,昇温時の急激な温度上昇を抑制する働きが強くなる為,目標値(SV)までの昇温時間は遅くなりますが,その分オーバシュートが起きにくくなります。
PD動作時のリセット
比例(P)動作または比例+微分(PD)動作において,生じるオフセットをなくすよう修正することをいいます。
PID動作(比例+積分+微分動作)
簡単に説明しますと,P動作でオーバシュートやハンチングを抑制し,I動作でオフセットを修正し,D動作で外乱による急激な温度変を短時間で収束させます。
このように,PID動作を使用することで,今まで以上の理想的な温度制御を行うことができるようになります。
オートチューニングにより,比例帯(P),積分時間(I),微分時間(D)およびARW各設定値の最適値を自動的に算出できます。
PVフィルタ機能
現在値(PV)の一次遅れ演算を行い,現在値(PV)の変動が激しいプロセス(圧力,流量など)の現在値(PV)を安定させる機能です。
PVフィルタ時定数が大きすぎると,応答の遅れにより制御結果に悪い影響を与えることがあります。
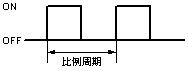
比例周期
比例帯の中で,目標値(SV)と現在値(PV)の偏差に応じて制御出力のON/OFF時間の割合が変化します。
このON/OFF時間の1サイクルを比例周期といいます。
比例帯
制御出力が,目標値(SV)と現在値(PV)との偏差に比例して変化する範囲をいいます。
ピーク電力抑制機能
設備の契約電力等で電力制限がある場合,電力のピーク値を抑制することで電力制限内で使用できるようにする機能です。
設計上の使用できる総電流を設定し,Ch毎に設定された電流値の合計が総電流を超えることなく制御を行うことができます。
ヒータ累積通電時間計測機能
通電時間と接点開閉やSSRのON/OFFの回数から,ヒータに通電しているおおよその時間を算出し,ヒータ交換時期の目安として使用できる機能です。
ふ
ファジイセルフチューニングPID動作(比例+積分+微分動作)
ファジイセルフチューニングPID動作とは,目標値(SV)で温度制御していて,外乱が発生した場合にPIDの微調整を自動で行い,現状での最適なPID値を算出し制御する機能です。
立ち上げ時は,あらかじめチューニングされたPID値で制御を行います。(*1)
温度が目標値(SV)で安定している時,外乱が発生すると,その収束状況をチェックし,必要に応じてPID値の微調整を行います。(*2)
外乱による変動からの収束がスムーズに行われた場合,PID値は変更しません。
収束速度が遅い場合,早く収束するようにPID値を修正します。
収束時にオーバシュートが発生した場合,オーバシュートが発生しなくなるようにPID値を修正します。
ハンチングが発生した場合,そのハンチングの波形を調べてPID値の微調整を行います。
*1: はじめてご使用になる場合,PIDオートチューニングを行うかまたはキー操作で適切なPID設定してください。
*2: 外乱変動が比例帯に対して大きい場合,自動的にPIDオートチューニングを実行します。PIDオートチューニング終了時の値は,計器電源を切っても消えません。
ファジイセルフチューニングPID動作で,微調整を行なったPID値は,計器電源を切ると,立ち上げ時に設定していた PID値またはPIDオートチューニング終了時の値に戻るようになっています。
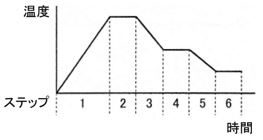
プログラム制御
プログラム制御は,時間の経過に伴って変化する目標値(SV)に現在値(PV)を追従させるように調節動作を行う制御です。
目標値(SV)と時間はステップ毎に設定でき,ステップ分の制御を連続して行います。
目標値(SV)は下図のように設定できます。
(例) 窯業電気炉,食品関連機械などのプログラム制御
プログラムコントローラはこちら
Fast-PID制御
応答性が良く外乱抑制向けに行う制御方式です。ただし,オーバシュートが大きくなります。
ほ
放射率
放射率は,ある温度の黒体または完全な放射を持つ物体から放射するエネルギー量と,同じ温度のある物体より放射するエネルギー量との比率です。
反射率と相反するもので,反射を全くしない物体表面は反射率“0”です。ということは放射率が100%,即ち“1”です。このような物体を黒体と呼びます。
光沢のある金属表面は80~95%の反射率です。
従って,放射率は0.05~0.2となり赤外線方式での計測は困難ですが,黒体テープ等を利用すれば測定は可能です。
飽和水蒸気圧
水蒸気が最大限,気体中(空気中)に含まれた状態を飽和といい,その時の水蒸気圧を飽和水蒸気圧といいます。
補償導線
熱電対の起電力は,測温接点と基準接点の温度差により発生するものですから,基準接点の温度変化はそのまま計器の指示誤差となります。
基準接点を温度変化の少ない所まで移す為補償導線を使用します。
補償導線は,熱電対素線の種類によって異なり,それぞれの熱電対に近似した熱起電力特性をもつ材質でできています。
この為,使用している熱電対用の補償導線をご使用ください。
(例) K熱電対を使用している時は,K熱電対用の補償導線をご使用ください。
ホールド機能(プログラム制御)
プログラム制御実行中,現在実行中のステップの進行を一時停止させる機能です。
一時停止した時点の目標値(SV)で定値制御を行います。
ま
マニュアル操作機能
マニュアル(手動)で出力操作量(MV)を変える機能です。
例えば,比例動作のように,偏差に比例した操作量(MV)が自動的に出力される制御をオート(自動)制御,これに対して偏差に関係なく,前面のキー操作等によって設定された値が出力される制御をマニュアル(手動)制御といいます。
マルチファンクション
センサ入力,警報動作,正/逆動作切替えなどの各種仕様の設定を,任意に行える機能です。
マルチレンジ機能
調節計の入力の種類を,前面キーまたは調節計内部のロータリースイッチ,ディップスイッチの操作により,任意に選択できる機能です。
む
無接点電圧出力(SSR駆動用)
無接点リレー(SSR)を駆動させる直流電圧を出力します。

無接点リレー出力(SSR内蔵)
温度調節計の出力部に,小容量のSSRを内蔵し,電磁開閉器(リレー)を介して負荷電流をオンオフします。
電磁開閉器(リレー)は,励磁電流1A以下の製品をご使用ください。
り
リピート機能(プログラム制御)
プログラム制御終了時,リピート回数分,最初のステップからプログラム制御を繰り返し実行する機能です。
リモート/ローカル
目標値(SV)の変更を,外部からの遠隔操作で行うことをリモート,調節計前面キーによる操作で行うことをローカルといいます。
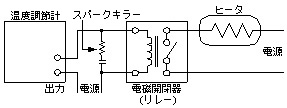
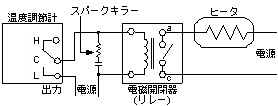
リレー接点出力
リレー接点の開閉によって,負荷電流をON/OFFします。
負荷電流が小さいときは,調節計のリレー接点で直接負荷をON/OFFしますが,一般的には外部に電磁開閉器(リレー)を介して負荷電流をオンオフします。
調節計のリレー接点と,負荷の間に電磁開閉器(リレー)を入れる事により,調節計のリレーの寿命を延ばすことができます。
ノイズの発生による悪影響を避けるため,CRフィルタ(スパークキラー)を入れることをおすすめします。
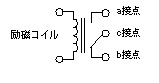
リレー接点
a接点
励磁コイルが励磁された時に接触する接点をいいます。
NO接点(normaly open)ともいいます。
b接点
励磁コイルが励磁されていない時に接触する接点をいいます。
NC接点(normaly closed)ともいいます。
c接点
励磁,非励磁により,a接点側,b接点側に移動する可動接点をいいます。[common]
る
ループ異常警報
出力操作量(MV)が100%または出力上限値に達した後,現在値(PV)がループ異常警報の判断時間内にその巾だけ(上昇)しない時,警報が出力されます。
また,出力操作量(MV)が0%または出力下限値に達した後,現在値(PV)がループ異常警報の判断時間内にその巾だけ(下降)しない時,警報が出力されます。
制御出力が冷却の時は,( )内がそれぞれ下降および上昇となります。
れ
冷却(正)動作
現在値(PV)が目標値(SV)より高い場合制御出力ON,現在値(PV)が目標値(SV)より低い場合制御出力OFFとなる制御動作の事をいいます。
例えば,冷凍庫は,冷却(正)動作となります。
ろ
露点
水蒸気を含んだ空気の温度(圧力は一定圧)を下げて行くと,空気中の水蒸気は飽和状態(飽和水蒸気[相対湿度100%RH])となり,この温度を境にして結露します。
この時を露点といい,この結露する温度を露点温度といいます。
A
ARW機能(アンチリセット・ワインドアップ)
PID制御での制御開始時,大きな偏差[目標値(SV)と現在値(PV)の差]があり,積分動作は現在値(PV)が目標値(SV)に達するまで一定方向に働き続けます。その結果,積分量が過大になりオーバシュートが発生します。
ARWを設定して,積分動作をする領域を制限することでオーバシュートを抑制します。
0%設定時,積分動作領域が最小の設定でオーバシュート抑制が最大になります。
50%設定時,積分動作領域が中の設定でオーバシュート抑制が中になります。
100%設定時,積分動作領域が最大の設定でオーバシュート抑制が最小になります。
オートチューニング機能を使うと,制御対象に対して適切なARW値を自動で設定できます。
ATバイアス
AT(オートチューニング)を実行すると,0%,100%のプロセスの限界変化を確認するため,目標値より大きく温度が上昇してしまう場合があります。
そのため,パラメータ算出時にも目標値をオーバさせないために,目標値より離れた位置で0%,100%と出力させる位置を決めることができます。
ATゲイン
立ち上げATで算出されたパラメータを用いて制御を行うと,制御特性が良好にならない場合や応答性が悪い場合小さく設定,振動的になる場合は大きく設定することで,PIDパラメータ算出時に比例帯の算出値が変化します。
F
Fast-PID制御
応答性が良く外乱抑制向けに行う制御方式です。ただし,オーバシュートが大きくなります。
G
Gap-PID制御
水位を一定にする場合に流量をコントロールしますが,流入・流出を行う際に外乱によって液面が大きく変動します。
この外乱の影響を緩和するため,偏差が小さい場合に外乱の影響を受けにくくする制御方式です。
O
ON/OFF動作
現在値(PV)が目標値(SV)よりも低い場合制御出力をONにし,現在値(PV)が目標値(SV)を越えた場合制御出力をOFFにします。
オーバシュートやハンチングが生じますので,精度を要求する温度制御には向きません。
ON-OFF制御
ON、OFFのみの制御方式です。
2位置制御とも呼ばれ,精度を求めない制御対象に使用します。
P
P動作(比例動作)
比例帯の中で,目標値(SV)と現在値(PV)の偏差に比例した操作量を出力する制御動作をいいます。
現在値(PV)がA点に達するまでは出力はON,これを越えると(比例帯に入る),比例周期で制御出力がON/OFFし始め,目標値(SV)を越えると完全に制御出力OFF状態になります。
[A点から目標値(SV)へ昇温するにつれ,制御出力のON時間が短くなり,逆にOFFの時間が長くなります。]
ON/OFF動作に比べ,オーバシュートはなくなり,ハンチングも小さくなりますが,オフセットを生じます。
オフセット修正機能によって,オフセットを0にする事ができます。
P動作は,気体圧力制御やレベル制御のような無駄時間の無いプロセスに向いています。
比例帯を大きくした場合
低い温度から制御出力がON/OFFするため,温度が目標値(SV)に昇温するまでに時間がかかり,またオフセットも大きくなります。
比例帯を小さくした場合
目標値(SV)付近から制御出力がON/OFFするため,温度が目標値(SV)に昇温するまでの時間は短くオフセットも小さくなりますが,ハンチングが大きくなります。
※比例帯を極端に小さくしますと,ON/OFF動作と同じような制御になります。
PI動作(比例+積分動作)
P動作で生じたオフセットを,I動作が自動的に修正し,目標値(SV)で温度制御を行います。
しかし,外乱による急激な温度変化に対しては,温度が安定するまでに時間がかかります。
PI動作は,変化速度の遅い温度制御に向いています。
I動作の時間を短くすると,修正動作は強くなり,オフセットは短時間で修正されますがハンチングを起きやすくします。
I動作の時間を長くすると,修正動作は弱くなり,オフセットの修正に時間がかかります。
PD動作(比例+微分動作)
PD動作は,P動作に比べて外乱による急激な温度変化に対しても応答が早く,短時間で制御を安定化させ,過渡応答特性の向上を図ります。
PD動作は,変化速度の速い温度制御に向いています。
D動作の時間を短くすると,修正動作は弱くなり,急激な温度変化に対する応答が遅くなります。
また,昇温時の急激な温度上昇を抑制する働きが弱くなる為,目標値(SV)までの昇温時間は早くなりますが,その分オーバシュートが起きやすくなります。
D動作の時間を長くすると,修正動作は強くなり,急激な温度変化に対する応答が早くなります。
また,昇温時の急激な温度上昇を抑制する働きが強くなる為,目標値(SV)までの昇温時間は遅くなりますが,その分オーバシュートが起きにくくなります。
PD動作時のリセット
比例(P)動作または比例+微分(PD)動作において,生じるオフセットをなくすよう修正することをいいます。
PID動作(比例+積分+微分動作)
簡単に説明しますと,P動作でオーバシュートやハンチングを抑制し,I動作でオフセットを修正し,D動作で外乱による急激な温度変を短時間で収束させます。
このように,PID動作を使用することで,今まで以上の理想的な温度制御を行うことができるようになります。
オートチューニングにより,比例帯(P),積分時間(I),微分時間(D)およびARW各設定値の最適値を自動的に算出できます。
PVフィルタ機能
現在値(PV)の一次遅れ演算を行い,現在値(PV)の変動が激しいプロセス(圧力,流量など)の現在値(PV)を安定させる機能です。
PVフィルタ時定数が大きすぎると,応答の遅れにより制御結果に悪い影響を与えることがあります。
S
SV上昇率(下降率) (設定値ランプ)
目標値(SV)の急激な変化が起こった場合,制御の目標値(SV)を徐々に変化させる機能です。
目標値(SV)が1分間に上昇(下降)する値を設定します。
目標値(SV)を変更した時,変更前の目標値(SV)から変更後の目標値(SV)まで,設定された変化率(℃/分)で制御します。
電源投入時は,現在値(PV)から目標値(SV)まで,設定された変化率(℃/分)で制御します。
SV上昇率(下降率)を0または0.0に設定すると,この機能は働きません。
Slow-PID制御
目標値追従性がよく,オーバシュートを抑えたい場合に使用する制御方式です。
射出成型機などオーバシュートが一度発生すると整定までに時間が要する場合に使用します。
2
2自由度PID制御
目標値追従と外乱抑制の2つに対して有効な制御方式です。
通常のPID制御に比べパラメータが増えますが,より精度のよい制御結果を得ることができます。
3
3導線式(測温抵抗体)
測温抵抗体において抵抗素子の一端に2本,他端に1本の導線を接続し,導線延長時の導線抵抗の影響を除くようにした方式です。
ただし,計器によりその精度を満足する為に1導線当たりの許容抵抗値があります。