| は |
パターンエンド出力
プログラムが終了した時点で,終了を知らせる出力のことです。
|
バランスレスバンプレス機能
オート(自動)制御からマニュアル(手動)制御に切り替えた時またはマニュアル(手動)制御からオート(自動)制御に切り替えた時に,操作量が急変するのを防ぐ機能です。
|
パリティ
1データを転送するごとに,データの誤りがないかどうかをチェックする方式の1つで,偶数パリティ,奇数パリティがあります。
|
半二重通信
両方向の伝送は可能ですが,送受信を交互に行う通信方式です。
|
ハンチング
制御結果が振動的になる時の状態をいいます。
|
| ひ |
ヒータ断線警報
ヒータ回路の導線1本をCTの穴へ通し,CTからの出力線を温度調節計のCT入力端子へ配線します。
ヒータ回路の導線に交流電流が流れると,導線の周囲に磁界が発生し,その磁界によりCTに交流電流が生じます。
この交流電流を測定しヒータに流れている電流値を求め,ヒータ断線警報設定値と比較します。
設定値より低ければ,ヒータが断線していると判断し,警報出力をオンにします。
|
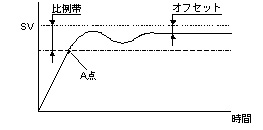
P動作(比例動作)
比例帯の中で,目標値(SV)と現在値(PV)の偏差に比例した操作量を出力する制御動作をいいます。
現在値(PV)がA点に達するまでは出力はON,これを越えると(比例帯に入る),比例周期で制御出力がON/OFFし始め,目標値(SV)を越えると完全に制御出力OFF状態になります。
[A点から目標値(SV)へ昇温するにつれ,制御出力のON時間が短くなり,逆にOFFの時間が長くなります。]
ON/OFF動作に比べ,オーバシュートはなくなり,ハンチングも小さくなりますが,オフセットを生じます。
オフセット修正機能によって,オフセットを0にする事ができます。
P動作は,気体圧力制御やレベル制御のような無駄時間の無いプロセスに向いています。
比例帯を大きくした場合
低い温度から制御出力がON/OFFするため,温度が目標値(SV)に昇温するまでに時間がかかり,またオフセットも大きくなります。
比例帯を小さくした場合
目標値(SV)付近から制御出力がON/OFFするため,温度が目標値(SV)に昇温するまでの時間は短くオフセットも小さくなりますが,ハンチングが大きくなります。
※比例帯を極端に小さくしますと,ON/OFF動作と同じような制御になります。
 |
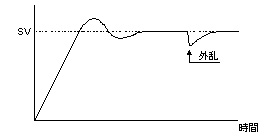
PI動作(比例+積分動作)
P動作で生じたオフセットを,I動作が自動的に修正し,目標値(SV)で温度制御を行います。
しかし,外乱による急激な温度変化に対しては,温度が安定するまでに時間がかかります。
PI動作は,変化速度の遅い温度制御に向いています。
I動作の時間を短くすると,修正動作は強くなり,オフセットは短時間で修正されますがハンチングを起きやすくします。
I動作の時間を長くすると,修正動作は弱くなり,オフセットの修正に時間がかかります。
 |
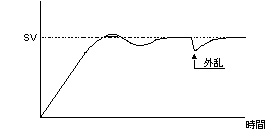
PD動作(比例+微分動作)
PD動作は,P動作に比べて外乱による急激な温度変化に対しても応答が早く,短時間で制御を安定化させ,過渡応答特性の向上を図ります。
PD動作は,変化速度の速い温度制御に向いています。
D動作の時間を短くすると,修正動作は弱くなり,急激な温度変化に対する応答が遅くなります。
また,昇温時の急激な温度上昇を抑制する働きが弱くなる為,目標値(SV)までの昇温時間は早くなりますが,その分オーバシュートが起きやすくなります。
D動作の時間を長くすると,修正動作は強くなり,急激な温度変化に対する応答が早くなります。
また,昇温時の急激な温度上昇を抑制する働きが強くなる為,目標値(SV)までの昇温時間は遅くなりますが,その分オーバシュートが起きにくくなります。
 |
PD動作時のリセット
比例(P)動作または比例+微分(PD)動作において,生じるオフセットをなくすよう修正することをいいます。
|
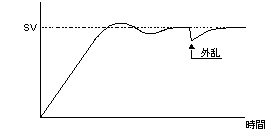
PID動作(比例+積分+微分動作)
PID動作は,制御動作のすべて(P, PI, PD)を兼ね備えた制御動作です。
簡単に説明しますと,P動作でオーバシュートやハンチングを抑制し,I動作でオフセットを修正し,D動作で外乱による急激な温度変を短時間で収束させます。
このように,PID動作を使用することで,今まで以上の理想的な温度制御を行うことができるようになります。
オートチューニングにより,比例帯(P),積分時間(I),微分時間(D)およびARW各設定値の最適値を自動的に算出できます。
 |
PVフィルタ機能
現在値(PV)の一次遅れ演算を行い,現在値(PV)の変動が激しいプロセス(圧力,流量など)の現在値(PV)を安定させる機能です。
PVフィルタ時定数が大きすぎると,応答の遅れにより制御結果に悪い影響を与えることがあります。
|
|
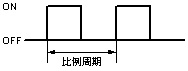
比例周期
比例帯の中で,目標値(SV)と現在値(PV)の偏差に応じて制御出力のON/OFF時間の割合が変化します。
このON/OFF時間の1サイクルを比例周期といいます。
|
比例帯
制御出力が,目標値(SV)と現在値(PV)との偏差に比例して変化する範囲をいいます。
|
| ふ |
ファジイセルフチューニングPID動作(比例+積分+微分動作)
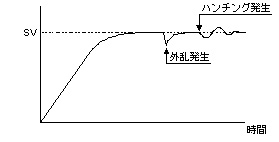
ファジイセルフチューニングPID動作とは,目標値(SV)で温度制御していて,外乱が発生した場合にPIDの微調整を自動で行い,現状での最適なPID値を算出し制御する機能です。
立ち上げ時は,あらかじめチューニングされたPID値で制御を行います。(*1)
温度が目標値(SV)で安定している時,外乱が発生すると,その収束状況をチェックし,必要に応じてPID値の微調整を行います。(*2)
外乱による変動からの収束がスムーズに行われた場合,PID値は変更しません。
収束速度が遅い場合,早く収束するようにPID値を修正します。
収束時にオーバシュートが発生した場合,オーバシュートが発生しなくなるようにPID値を修正します。
ハンチングが発生した場合,そのハンチングの波形を調べてPID値の微調整を行います。
*1: はじめてご使用になる場合,PIDオートチューニングを行うかまたはキー操作で適切なPID設定してください。
*2: 外乱変動が比例帯に対して大きい場合,自動的にPIDオートチューニングを実行します。PIDオートチューニング終了時の値は,計器電源を切っても消えません。
ファジイセルフチューニングPID動作で,微調整を行なったPID値は,計器電源を切ると,立ち上げ時に設定していた PID値またはPIDオートチューニング終了時の値に戻るようになっています。
|
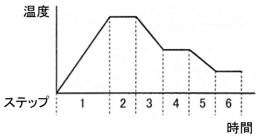
プログラム制御
プログラム制御は,時間の経過に伴って変化する目標値(SV)に現在値(PV)を追従させるように調節動作を行う制御です。
目標値(SV)と時間はステップ毎に設定でき,ステップ分の制御を連続して行います。
目標値(SV)は下図のように設定できます。
(例) 窯業電気炉,食品関連機械などのプログラム制御
プログラムコントローラはこちら
|
| ほ |
放射率
放射率は,ある温度の黒体または完全な放射を持つ物体から放射するエネルギー量と,同じ温度のある物体より放射するエネルギー量との比率です。
反射率と相反するもので,反射を全くしない物体表面は反射率“0”です。ということは放射率が100%,即ち“1”です。このような物体を黒体と呼びます。
光沢のある金属表面は80~95%の反射率です。
従って,放射率は0.05~0.2となり赤外線方式での計測は困難ですが,黒体テープ等を利用すれば測定は可能です。
|
飽和水蒸気圧
水蒸気が最大限,気体中(空気中)に含まれた状態を飽和といい,その時の水蒸気圧を飽和水蒸気圧といいます。
|
補償導線
熱電対の起電力は,測温接点と基準接点の温度差により発生するものですから,基準接点の温度変化はそのまま計器の指示誤差となります。
基準接点を温度変化の少ない所まで移す為補償導線を使用します。
補償導線は,熱電対素線の種類によって異なり,それぞれの熱電対に近似した熱起電力特性をもつ材質でできています。
この為,使用している熱電対用の補償導線をご使用ください。
(例) K熱電対を使用している時は,K熱電対用の補償導線をご使用ください。
|
ホールド機能(プログラム制御)
プログラム制御実行中,現在実行中のステップの進行を一時停止させる機能です。
一時停止した時点の目標値(SV)で定値制御を行います。
|